本文接前文:
并列式拉丝机的变频恒张力驱动目的是为了保证在运行过程中丝线的张力恒定。
根据机械结构和材料的不同,恒张力控制的方法一般分为两种:
1、直接控制电机输出转矩;
2、通过控制速度恒定来保证张力的恒定。
通过对机械结构的分析,本项目采用通过控制速度的方法来间接控制张力的恒定。
并列式拉丝机由11组牵伸机构和1组收卷机构组成,所以我们单独对一组牵伸机构和一组收卷机构来进行控制原理的分析。如下图1为一组牵伸机构的结构示意图。
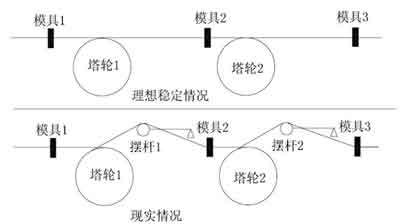
图1 并列式拉丝机牵伸机构结构示意图
在稳定运行过程中--我们将条件理想化(排除其他不稳定因素的影响),摆杆将停在设定的位置不出现波动,塔轮只需要按照计算出来的理论线速度运行就可以保证丝线张力恒定,此过程只需要知道每级牵伸机构中塔轮的理论线速度即可;由于机械一旦制造完成,塔轮的直径以及电机端的减速比就已经确定,从塔轮的理论线速度就可以计算出电机的实际运行转速,也就是变频器需要运行的频率。
实际在运行过程中会出现很多的不稳定因素,例如丝线的打滑,机械摩擦力变化等原因,摆杆不可能固定不动,于是就需要变频器对摆杆的变化做出响应,通过速度的变化来达到让摆杆稳定的目的,这个就是自调节的过程。通过变频器对摆杆信号进行PID的运算,就可以达到这个目的。
如下图2牵引驱动机构参数的详细示意图,让我们看看图中变量之间的关系。
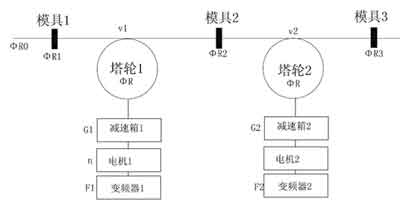
图2. 牵引结构参数示意图
如图2所示,假设塔轮直径为R,拉丝模具1直径为R1,拉丝模具2直径为R2,拉丝模具3直径为R3,进线直径为R0,电机1减速齿轮比为G1,电机2减速齿轮比为G2,变频器1指令频率为F1,变频器2指令频率为F2,塔轮1上的线速度为v1,塔轮2上线速度为v2,n为电机1转速,s为电机1转差率,p为电机1级对数,t为时间。G1定义为(负载侧齿轮10-24/电机侧齿轮10-23)。
牵伸机构中,由于拉丝模具大小不一样,根据单位时间内通过模具的材料体积相等的前提条件,
我们知道:(R1/2)²*π*v1*t=(R2/2)²*π*v2*t
R1²*v1=R2²*v2…………………………①
由于R1,R2已知,根据v1就可以计算出v2。
而v1=π*R*n/G1,n=F1*60*(1-s)/p
v1=π*R*F1*60*(1-s)/(G1*p)
F1=G1*p*v1/(60*π*R*(1-s))…………………………②
通过以上①②公式,就可以计算出每一级牵伸的理论线速度和理论频率。
下图3为收卷机构的结构示意图。
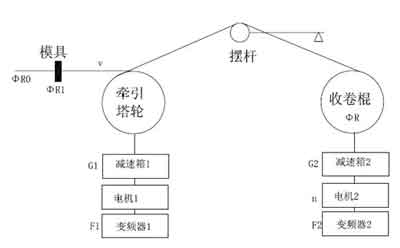
图3 拉丝机收卷结构示意图
收卷机构的控制原理与牵伸机构有两点不同:
1、收卷机构与牵引机构的线速度是同一的;
2、收卷机构中收卷棍的卷径是会随着电机运转而发生变化的,牵伸机构中的卷径是固定的。所以对于控制收卷棍的变频器,还需要将R的变化考虑进去,时时更新R值。原理公式同上式②。
本文内容来自互联网,由天长市振华拉丝模厂 http://www.lsmcn.cn 整理。